01
2025.07.09(Wed)
#45
目次
――まずは本プロジェクトの概要をお聞かせいただけますでしょうか。
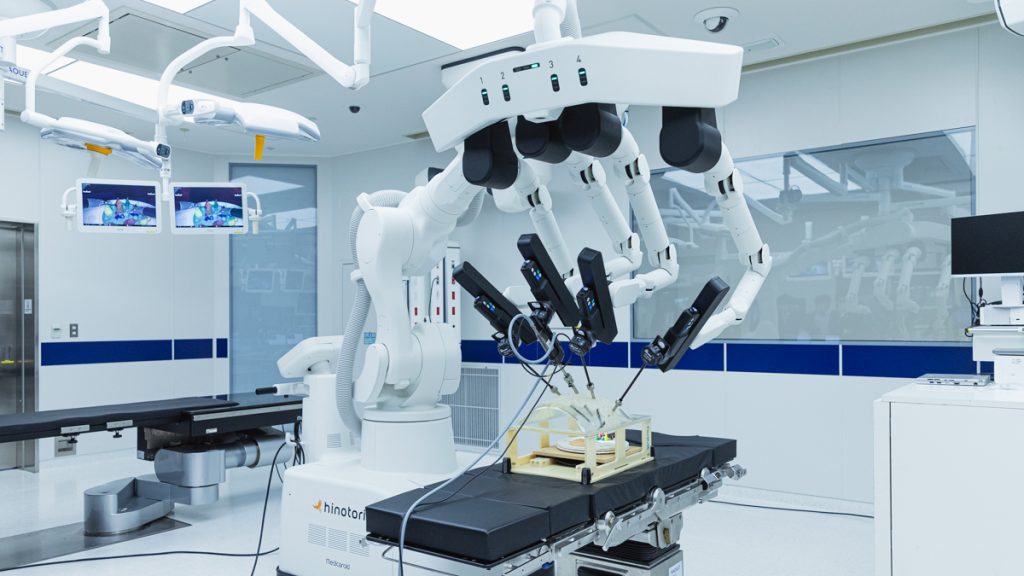
山口雷藏氏(神戸大学医学部附属病院国際がん医療・研究センター 以下、山口氏):今回のプロジェクトは、内閣府の「地方大学・地域産業創生交付金事業」を活用した、最先端の国産手術支援ロボットの開発を推進する「神戸未来医療構想」の一環です。神戸大学の医学的知見と、国産の手術支援ロボットである「hinotori™」を開発したメディカロイドのロボット制御技術と、NTT Com、NTTドコモの通信技術を医療の現場で融合させることで、「遠隔ロボット手術」という新たな技術を確立し、将来的には社会実装することを目的としています。
このプロジェクトの背景にあるのは、ロボットによる手術のデジタル化です。従来の開腹手術は、医師が患者さんに対して直接行う「アナログ手術」といえます。手術時の傷が小さくて済む内視鏡手術も、医師が患者さんに対して直接行うのでアナログです。一方、ロボット手術では、医師がコックピットでコントローラーを操作します。この操作がデジタル信号となってロボットに伝わり、ロボットが患者さんに手術を行う仕組みです。これはつまり、手術の情報がデジタル化されたということであり、非常に革新的なことです。
現在のロボット手術は、医師も患者さんも同じ手術室内にいる状態で行われています。しかし、デジタル化された手術情報を通信回線に乗せて遠隔地に届けることができれば、離れた場所からロボットを操作できるようになり、遠隔地から手術が可能になると考えられます。
神戸未来医療構想のなかで遠隔ロボット手術に関するアイデアを実現するためには、まず実証実験を実施できる場を整備する必要がありました。そこで、2020年度からNTTドコモに参画いただき、われわれの病院などの拠点に5G基地局を作るところから始めました。その後、メディカロイドにも参画いただき、手術支援ロボットhinotori™をご提供いただくとともに、ロボット側の課題抽出や最適化にご協力いただいています。
――遠隔ロボット手術が社会実装されると、医療現場のどのような課題解決につながるのでしょうか?
山口氏:主に3点挙げられます。1点目は、都市部と地方における医療格差の改善です。地方では過疎化が進み、病院の数も減少しています。すると、ロボット手術のような先進的な医療を行う医師が都市部に移ってしまいます。遠隔地からでも手術を行えるようになると、地方でも都市部と同じレベルの手術が受けられるようになり、医療の質が均てん化されることが期待できます。
2点目は、働き方改革です。地方の過疎化にともなって医師が都市部に移ると、患者さんも都市部に集中します。実際、都市部の大きな病院では、手術までの待ち時間が延びていますし、医師の残業時間も長くなっています。そうした状況のなかで、2024年度から医師の働き方改革が始まり、労働時間が制限されると、今まで以上に現場が回らなくなってしまう可能性があります。遠隔ロボット手術が可能になれば、都市部への患者さんの集中が緩和され、都市部の医師の労働時間短縮につながるでしょう。
そして3点目は、若手医師の教育です。先進的な手術を行う医師が都市部に集中すると、新しい技術を学びたい若い医師が地方に行きたがらなくなります。遠隔ロボット手術の仕組みを使えば、遠隔での手術指導も可能になりますので、先進的な技術をどこでも学ぶことができるようになります。


北辻博明氏(メディカロイド 以下、北辻氏):メディカロイドは医療用ロボットのメーカーとして、1人でも多くの患者さんの幸せに貢献したいという思いがあります。山口先生が挙げてくださった課題の解決は、最終的に患者さんの利益につながるものですし、本プロジェクトに対する山口先生のお考えに賛同して参画を決めました。われわれが開発したhinotori™は、もともと医師の先生方のご意見を取り入れながら進化してきたロボットですが、遠隔手術という新たな領域を開拓するこのプロジェクトを通しても、先生方から直接ご意見を伺い、改善し、技術的な検証を重ねています。

――遠隔ロボット手術に必要な通信の部分においてNTTドコモおよびNTT Comはそれぞれどのような役割を担っているのでしょうか?
吉田太一氏(ドコモビジネスソリューションズ 神戸支店 以下、吉田):ソリューション事業を担うNTT Comが実証における通信ログの調査および解析を実施し、5Gネットワークを保有するNTTドコモが遠隔手術に見合うネットワークの研究および最適化を進めています。NTT Comが、本実証のいわば中心的な役割であり、5Gネットワークの高度化や最適化の計画に合わせた実証実験のマネジメント全般を担当しています。私の所属するドコモビジネスソリューションズは、神戸大学を担当するNTT Comグループの地域営業という立ち位置です。

森広芳文(NTTドコモ 以下森広氏):私たちはドコモR&Dセンタにおいて、ドコモの先進技術を活用した主に医療ユースケースの実現に取り組んでいます。 神戸大学とは共同研究契約を締結し、本プロジェクトがスタートした2020年度当初から実証実験全般についてさまざまな技術支援を行ってきました。

――今回の実証実験における通信サービスとしてdocomo MECというネットワークサービスが使われているとのことですが、これはどのようなものなのでしょうか。
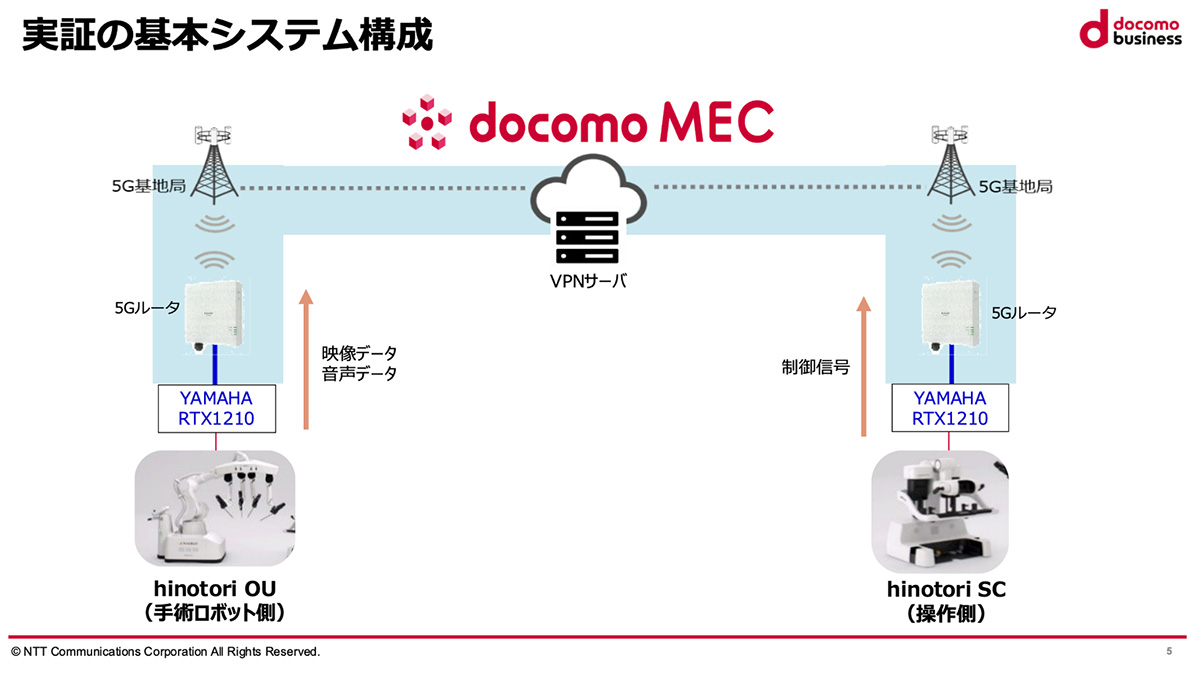
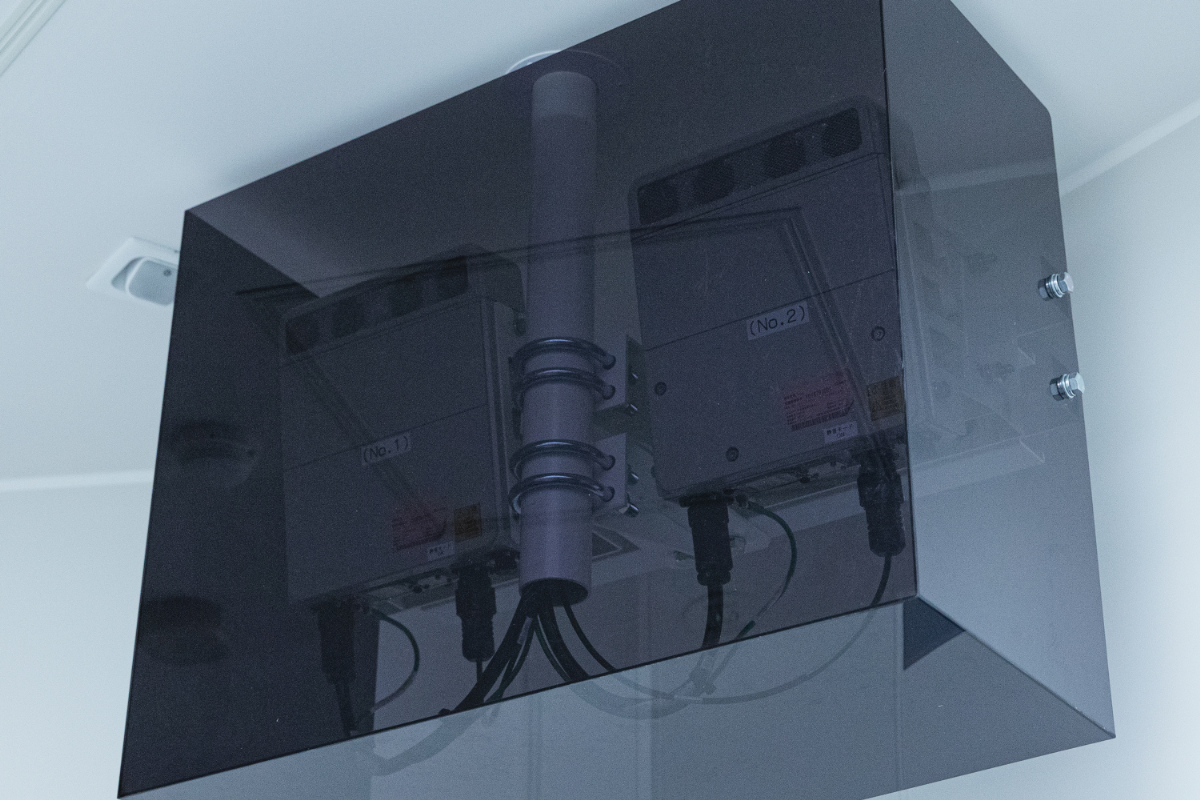
長坂豪士(NTT Com 以下、長坂):docomo MECは、利用場所にできるだけ近い所にサーバーを配置し、クラウドを活用しながら、インターネットを経由せずにドコモのネットワーク内で通信を行うことで、5G通信のリアルタイム性とセキュリティを向上させる仕組みです。遠隔ロボット手術の場合、低遅延であることと、セキュリティが担保されることが非常に重要です。そこで今回は、docomo MECの中でも「MECダイレクト」というサービスを使い、5G通信端末をdocomo MECのクラウド基盤に直接つなぐことで、遅延をさらに低減するとともに、高いセキュリティを実現しています。
本プロジェクトの基本システム構成ですが、hinotori™のコックピットとロボット本体を、それぞれ5G通信用のルーターに接続し、無線で5Gの基地局にデータを飛ばします。両者をつなぐ部分がdocomo MECになります。本プロジェクトの実証実験では、大分県にあるクラウド基盤を経由してデータの送受信を行っています。

――docomo MECは、従来の病院や手術室の通信環境とはどのように異なるのでしょうか?
山口氏:そもそも通常の手術室にはほぼ有線通信しかありませんし、通信は院内で完結しています。しかし、遠隔ロボット手術となると、外部との通信が発生します。そこで問題となるのがセキュリティです。
森広氏:院内だけのクローズドなネットワークであればセキュリティは保てるのですが、他の病院と接続するとなると、どうしてもセキュリティのリスクが生じます。docomo MECは、手術支援ロボットからダイレクトにNTTドコモのネットワークにつながるため、セキュリティのリスクを解消できます。
山口氏:遠隔ロボット手術では、遅延も大きな問題になります。病院間を専用の光ファイバー回線で接続できれば、通信速度の面でもセキュリティの面でもベストですが、それでは膨大なコストがかかるため、社会実装が困難です。コストを抑えつつ、低遅延とセキュリティを実現する方法が、社会実装のためにはどうしても必要で、最初から商用5G回線を使うことをコンセプトに組み込んでいました。
――本プロジェクトでは2020年から実証実験を重ねていますが、これまでに見えてきた課題や改善点についてお聞かせいただけますか。
山口氏:医療側としては、きちんと手術ができる環境をつくっていただくことが第一でした。先ほどお話ししたとおり、まず基地局の設置からスタートしましたが、手術室の中に基地局を置くこと自体が初めてだったようで、さまざまなハードルがありました。基地局が設置された後も、実際に接続してみると遅延が大きく、通信も安定しない。スムーズに動いていたと思ったら、急に動かなくなったり、動くスピードが変わったり、画像にノイズが発生してブラックアウトしたりと、これでは手術の実施は難しいというのが最初の実感でした。
そこで通信状況を改善するために、情報量をいかに少なくできるかを考えました。医師の立場では、遠隔手術の際に得られる映像が精緻であるほど手術がしやすくなると考えていましたが、送受信する情報量が大きくなると遅延も大きくなるため、通信側としては情報量をできるだけ少なくしたいわけです。そこで、「手術が可能な範囲で最も粗い映像のスペックとは?」という観点で映像を見直しました。メディカロイドにもデータの圧縮方法を検討していただき、手術が可能な最小スペックが見つかりました。

――hinotori™はどのように改良されてきたのでしょうか?
大橋政尚氏(メディカロイド 以下、大橋氏):もともとhinotori™は手術室内でのロボット手術を実施するための機器で、有線通信での稼働を想定したものです。遠隔ロボット手術のためには、これまでケーブルで送受信していた映像や操作の信号を、NTTドコモのネットワークに乗せて通信できる形に変換する必要がありました。当初は、途中で通信が切れたり通信速度が揺らいだりすると、ロボットがデータを正しく扱えなくなることがありました。どのような場面でも動作するように工夫する必要がありました。
改善のプロセスは、hinotori™が独自に仕様を決めるというよりも、ネットワークとの組み合わせの要素が大きいため、問題が生じた部分をNTTドコモに解析していただき、どのような仕様なら実現できそうかディスカッションを重ねながら改善を進めました。
――通信面ではどのような課題がありましたか?
長坂:2020年度にプロジェクトが始まった段階では、5G自体がまだ黎明期で、みなさんのお話にもあったように接続が不安定でした。遠隔ロボット手術では、映像を連続的に送受信するため、安定した接続環境が不可欠です。しかし当初は、途中で切断される、突然5Gから4Gに落ちてしまう、通信帯域が狭まってデータが送信できなくなる、といった事象が頻発していたため、まずはこうした課題の解消に注力しました。
本プロジェクトで見つかった課題や得られたデータを社内で共有し、技術的な観点でNTTドコモからアドバイスをもらいながら、通信環境を整えていきました。その結果、2021年3月の実証実験では、神戸市内の2拠点を5Gでつなぎ、遠隔手術に耐えうるような接続環境を実現できました。2021年度後半には安定した通信環境が見えてきたため、「5G回線を使ってロボットを操作する」というロボットとの組み合わせに関して建設的な議論を行える段階になりました。
魯宥辰(NTTドコモ 以下魯氏):2022年度以降は、ネットワークの遅延と揺らぎをさらに減少させるべく、実証実験を繰り返しています。神戸-東京間での接続にも成功しました。とはいえ、遠隔手術ではより低遅延であることが必須ですし、まだまだ改善の余地があると考えています。さらに、帯域のアップリンクに関して、どれだけのデータ流量を確保する必要があるのかという部分も検証が必要でした。これは実証実験を通してすでに明確になっています。

――今日(取材当日)も実証実験を行っていらっしゃいますが、どのような点を検証しているのでしょうか。
長坂:今日の実験では、神戸と東京をつないで、高度化した5G回線にロボットを接続した場合に、どの程度の性能が出せるのか検証しています。3年前と現在では、基地局の構成が変わっています。当初は4Gのコア装置と5Gの基地局をペアにした「NSA(ノン・スタンドアローン)方式」だったのですが、現在は、すべて5G単独の構成である「SA(スタンドアローン)方式」になっています。4Gを経由せずに5G通信が活用できるようになっているため、従来よりもさらに通信が安定し、遅延も低減することが期待されます。今のところ、想定よりもシビアな設定でも稼働できそうな実感がありますし、通信が安定しているというデータも得られています。
山口氏:正直なところ、3年間でよくここまで来たなと思います。最初は「本当に遠隔ロボット手術なんて可能なのか?」という声もありましたし、全く異なる分野の組織が集まったチームですから、共通言語もなく、お互いの考えや背景を理解するのに時間がかかりました。しかし、この3年間でお互いの技術に対する理解が進みました。コロナ禍で遠隔技術に対する要求が高まったことも後押しになったと思います。何より、このプロジェクトは実証実験を行うたびに、必ず何かしらのステップアップがあるのです。素晴らしいことだと思います。

――遠隔ロボット手術の実現に向けて、各自が乗り越えるべきだと考えている次の課題についてお聞かせください。
山口氏:われわれの目的は遠隔手術を社会実装することですので、医療側としては、社会実装にあたってどのような社会システムが必要なのか考えなければなりません。まず、遠隔ロボット手術は、遠隔手術に関する知識を持った外科医が行うべきだと思いますので、学会が何らかの認定制度を作る必要があるでしょう。また、関連学会がガイドラインを作成していますが、これも一本化しなければなりません。さらに、遠隔地の医師と現地の医師の責任分担に関する議論も出てくるはずです。医師が国と話し合って、こうした制度の構築を進めなければなりません。
大橋氏:hinotori™に関しては、遠隔であっても、先生方が手術室内での手術と同じようにロボットを使用できるように、安全性を高めていく必要があると考えています。例えば、通常よりも通信速度が低下した際に、執刀している先生に「今、通常よりこのぐらい遅れています」といった情報が伝わるだけでも、先生は心構えができて、より安全な手術につながると思うのです。では、ロボット側でどのように遅延を検知し、どのような形で先生に伝えるのがよいのか。技術開発を進め、先生方からフィードバックをいただいて、遠隔ロボット手術に対応した安全性を確立したいと考えています。
魯氏:NTTドコモの役割は、遅延などのネットワークの問題を少しでも減らすべく、新たな技術を導入し、さらに実証実験を重ねて検証を続けることだと考えています。スタンドアローン方式の環境が実現したことで、通信のさらなる高度化が可能になっています。例えば、ネットワークを仮想的に分割し、サービスごとにさまざまなニーズに対応できる「ネットワークスライシング」や、通信の優先順位を制御して遅延や通信量を改善する「QoS」といった技術の導入が考えられます。
――将来の展望も伺えればと思います。利用シーンの拡大や機能の拡張などの想定はありますか?
大橋氏:冒頭に山口先生から「手術のデジタル化」という話がありました。今われわれは、デジタル化された手術データを遠くに届けるために技術開発をしているわけですが、このデジタル化されたデータの利用シーンを増やしていくべきだと考えています。手術支援ロボットには、ロボットの動きや医師の操作などのログが蓄積されます。これを有効活用できないか、ということです。
例えばA病院にロボットを操作する医師がいて、B病院に患者さんがいるとします。B病院でロボットのアーム同士がぶつかっていたとしても、A病院からはB病院の様子を直接見ることができないため、どのような角度でぶつかっているのか分かりません。そこで、デジタル化されたデータを活用してロボットの動きを再現するような仕組みを作り、両病院に共有すれば、離れた所にいても同じ手術室にいるかのような環境を整えることができます。
山口氏:最終的に目指すべきところは、手術ログを集約してビッグデータ化し、AI解析やシミュレーションを実施して、定型的で簡単な手術手技の部分ではロボット自身が考え、ロボットだけでも手術が行えるような部分的自動・自律型のロボットを開発することでしょう。現状想定されている遠隔ロボット手術は、医師が遠隔地にも現地の病院にもいる形ですが、グローバルな視点で考えると、現地に医師はおらず、遠隔地からの操作だけで手術を完遂できる「完全遠隔手術」が求められているのです。
日本の医療制度は、地方の過疎化が進んでいるとはいえ恵まれていて、国際的に考えれば外科手術が可能な病院が比較的多い状況です。一方、海外においては広大な国土を持ちながら、病院が少なく、外科医療も整っていない国の方が多く存在します。そういった国では完全遠隔手術が求められていて、その安全な実現のためには、安定した低遅延の通信環境はもとより、部分的な自動・自律型ロボットの技術が必要です。われわれが実証実験で磨いている技術は、完全遠隔手術にも応用可能ですし、hinotori™のグローバル展開を見据えた場合、最終的には完全遠隔手術まで進める必要があるでしょう。
長坂:将来的には、全国どこでも遠隔手術を実施できるような環境づくりが必要になるでしょう。今は神戸と東京をつないで検証を進めていますが、例えば今日はA病院とB病院、明日はA病院とC病院というように、複数拠点でのグループ構築や最適化といったことも検討が必要だと思います。また、山口先生も含め、学会などで全国を飛び回っている忙しい先生が多数いらっしゃいます。そういった方々は、たとえ出張中であっても、研修医や若手の医師の方からサポートしてほしいという依頼が来るといいます。5Gはモバイル回線ですので、スマートフォンのようにどこでも接続できます。例えば船の上など、どこからでも手術を行えるようになれば、医師の方々がリモートワークできるようになるかもしれません。
魯氏:ドコモとしては超高速・低遅延を安定的に提供する技術、先にお話ししたネットワークスライシングやQoSに関して、引き続き検討し、検証を推し進めたいと思います。また合わせて、NTN(Non-Terrestrial Network:非地上系ネットワーク)技術を取り入れることで、離島や船上などへの利用可能エリアの拡大に関しても検討できればと考えています。
吉田:今回のプロジェクトを通して遠隔ロボット手術が社会実装されることは、それだけ通信の発展や技術強化にもつながります。まずは本プロジェクトの成功が第一ですが、これを皮切りに他の分野でもわれわれの通信技術を活用し、さらなる社会貢献に取り組んでいくことができればと思います。


OPEN HUB
Theme
Partnership with Robots
#ロボティクス
OPEN HUB
THEME
Partnership with Robots
#ロボティクス