
01
2024.04.20(Sat)
目次
今回の体験会で披露されたのは、ロボットやモビリティのような「移動するIoT機器」の遠隔操作を行うために、ネットワークエッジとの連携やエッジ側から送られる膨大な情報量の収集を可能にするIoTミドルウェア「intdash(イントダッシュ)」と、それを導入した「ロボットとAIの連携」と「リアルタイムデジタルツイン」システムを用いたソリューションです。

NTTコミュニケーションズ(以下、NTT Com)は、intdashの開発元であるアプトポッドと業務提携を結んでおり、インテグレーションパートナーとしてサーバー(intdash server)/ネットワークエージェント(intdash Edge Agent)間におけるネットワークとセキュリティの面でさまざまなサービスを提供し、協業を行っています。
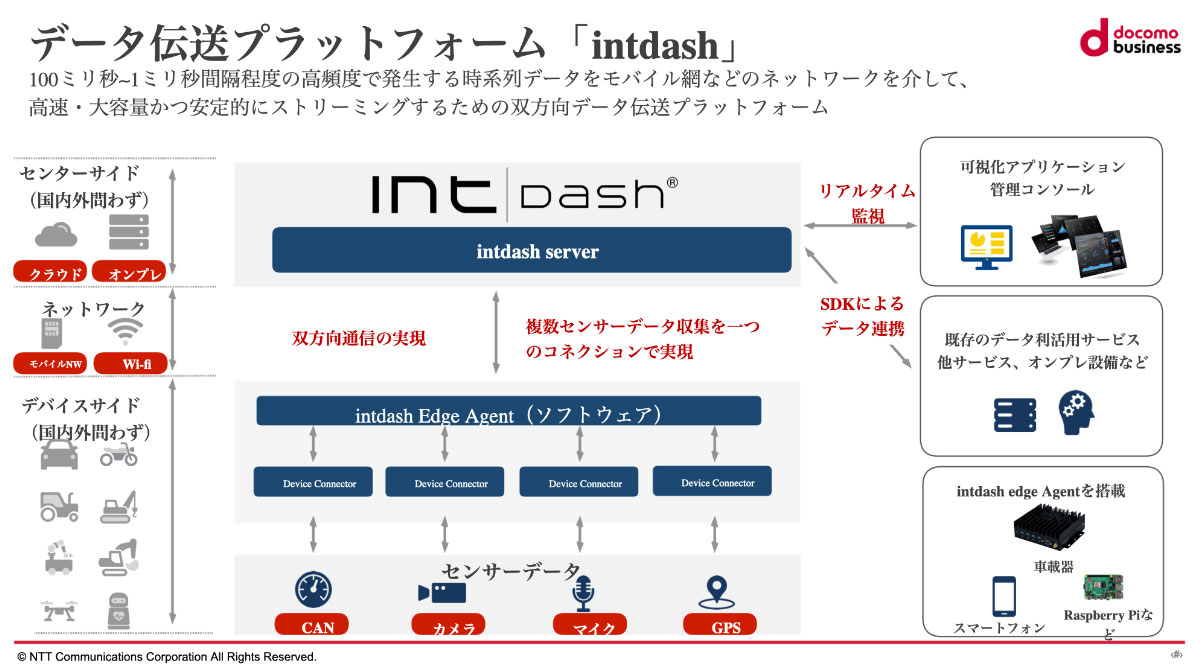
自動車やロボット、重機、農機といった機体のネットワークエッジデータをクラウドやサーバーにつないで、リアルタイム性のある双方向通信を可能にする高速プラットフォームであるintdash。その特徴は主に3つあり、非通信エリアで生じたデータも自動で取得できる「欠損回収」、異なる複数のセンサーデータの各送信データに打刻をし、異なるデータの時系列を一致させることでデータの統合を容易にする「タイムスタンプ」、独自プロトコルを用いることでデバイス間のクラウド経由の低遅延通信を可能にする「低遅延」が挙げられます。
体験会の前半では、実際にintdash Edge Agentを搭載したスマートフォンを使ったデモンストレーションが行われました。スクリーンに映し出されたintdashのダッシュボードには、スマートフォンに内蔵されたカメラやGPS、加速度センサー、ジャイロセンサーからintdash Edge Agentがリアルタイムに収集したデータが表示されます。


クラウドネットワークを介しているにも関わらず、参加者が動かすスマートフォンのカメラや各種センサーから取得したデータはほとんど遅延することなくダッシュボードに表示されます。
intdashは、収集したデータの分析も行うことができ、あらかじめ設定した閾値(しきいち)を超えた際にアラートを発報する検知や、AIと連携したデータ処理といった機能も備えています。例えば、前者は車のエンジンの回転数や車速などのセンサーデータから車体の異常をリアルタイムで検知したり、後者はロボットに接続したカメラ映像を映像分析サービスに連携して顔認証を行ったりといった活用方法が想定できます。
今後ローカル5Gやdocomo MECといった低遅延ネットワークを用いることでより高速かつセキュアにデータ収集を行っていくことが可能になります。
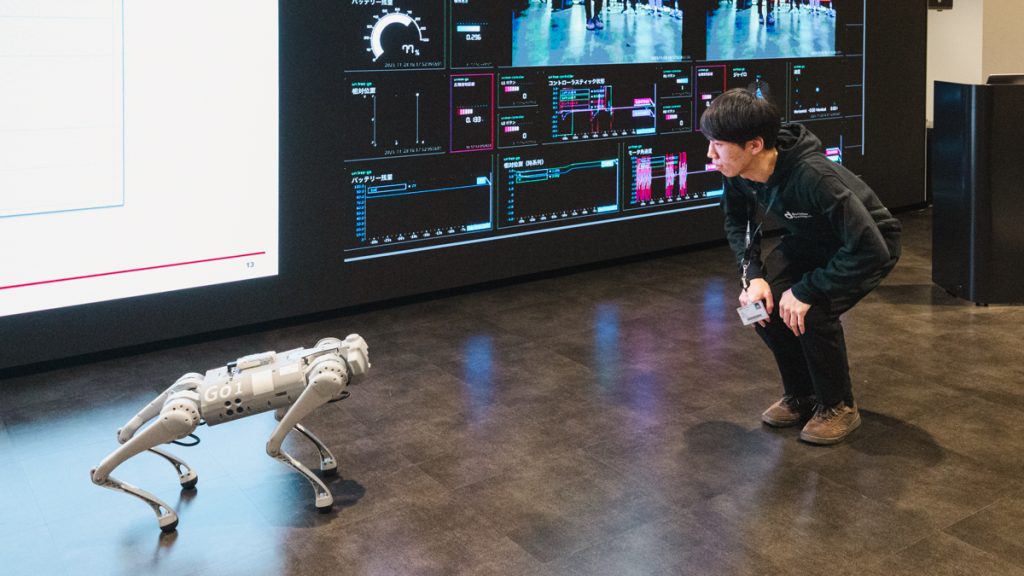
体験会は、intdash Edge Agentを搭載した四足歩行ロボット「Unitree Go1」とAIと連携した分析サービスを用いた遠隔操作のデモンストレーションに進みます。これはintdashによる遠隔操作によって、敷地内を移動しながら警備を行うことを想定しています。

ロボットの制御は、コントローラーからサーバーを経由して行います。ダッシュボードにはロボットの前方に付いたカメラからの映像やバッテリー残量、機体の速度、温度のほかに、超音波センサーによる周囲の物体との距離などが表示されています。時系列データも収集され、過去データの可視化もできます。
そして、右上(下図)に表示されているのが、AIが検知した人物を色枠で描画した映像です。あらかじめ人物の写真をホワイト/ブラックリストとして読み込ませておけば、そうした判別のもとに検知を行うことも可能になります。



続いて行われたのは、作業プロセスの効率化や故障予測の実現、デジタル空間上での設計・試験によるコスト削減といった部分での活用が期待されるデジタルツインと、intdashを組み合わせたソリューションの体験です。

現実世界で収集された情報をもとにモデル化したデジタル空間と、空間上でのシミュレーションによって分析・予測を可能にするデジタルツインですが、その社会実装を進めていく上でネックになっているのが、膨大なデータ収集と、現実世界とのリアルタイムな連動性が求められる点です。つまり、デジタルツインを構築するためには、大量のデータを時系列にそろえながら低遅延で収集する必要があるのです。また、道路交通や工場・工事現場など各地に分散する環境を統合的にデジタルツイン化するためには、広域にまたがった基盤上での効率的なデータ伝送も重要となります。
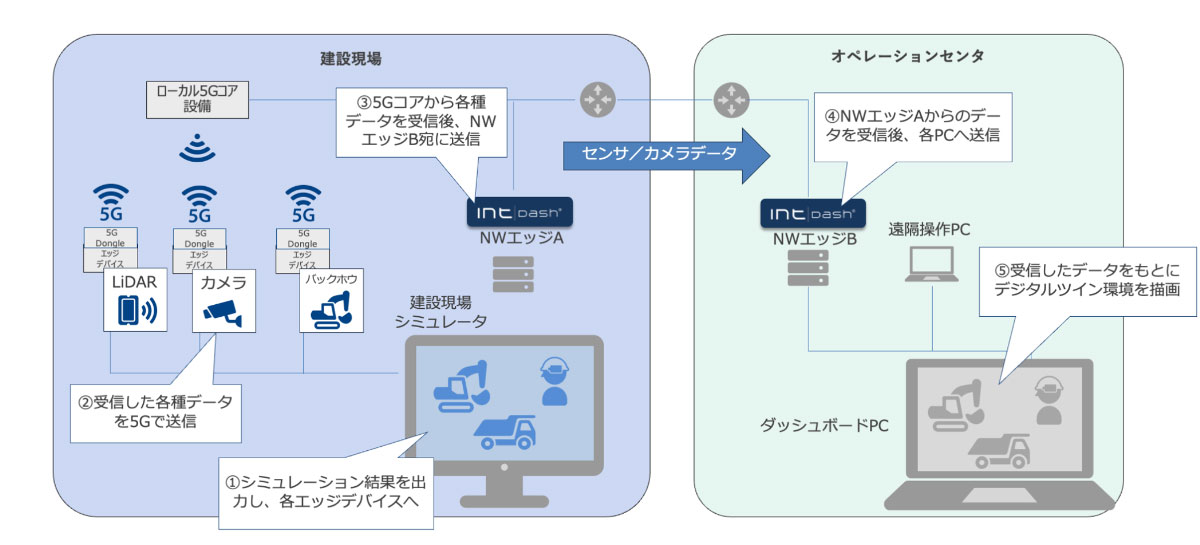
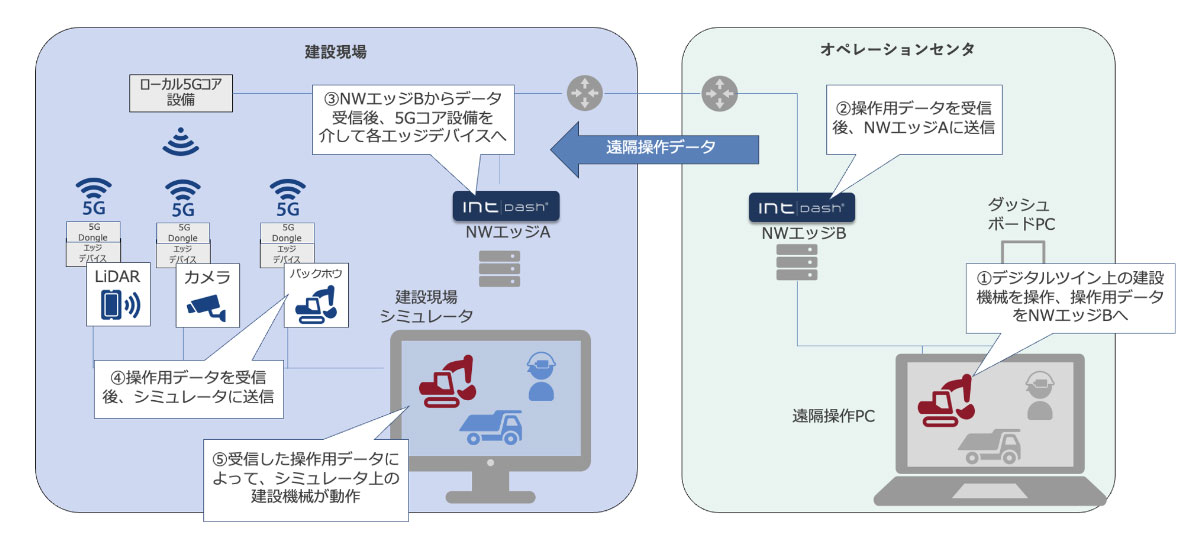
この日、披露された体験用のソリューションは、土木建設現場での建設機械の遠隔制御をユースケースとして想定したもので、広域分散機能を持つIoT向けエッジコンピューティング基盤(ネットワークエッジ機能)とintdashを組み合わせることで、広域に分散して点在する建設現場やオペレーションセンターなどをつなぐことを可能にし、リアルタイム性の高いデジタルツインを実現したプラットフォームです。

このユースケースでは、現場のデータ計測に「LiDAR」というレーザー光を使ったセンサーを使用しています。3次元で対象物までの距離、位置、形状を同時に検知でき、ミリ波レーダーと比較して小さい物体を検知することができるLiDARは、車両に搭載し自動運転でのセンシングや、建物や地形の3Dモデル作成などを可能にする高性能センサーです。

今回の体験ユースケースでは、各現場やオペレーション拠点に配置されたエッジコンピューティング基盤による拠点間データ伝送を土台に、LiDARによるセンシングデータを基盤上に配置したintdashに収集。収集データをもとに各現場をデジタルツイン化し、建設機械のオペレーターは、デジタルツイン上で現場のリアルタイムなモニタリングの遠隔操作を実行していきます。

各ソリューションの体験会の終了後には、こうした遠隔システムを将来的に実装していくことを見据えた参加者たちが、NTT Comの説明員たちに具体的な仕様などについて個別に尋ねる相談会の時間も設けられ活発な相談が行われました。
働き方改革法案によって労働時間が制限される2024年問題を控え、より効率的かつ柔軟な働き方を可能にする現場のあり方が求められている今。体験会で披露されたような、intdashやネットワークエッジ機能といった技術は、AIやデジタルツインのポテンシャルを最大限に引き出し、作業の効率化や省人化といった課題のみならず、これまで考えもしなかった新しい働き方を社会に提示してくれるかもしれません。

OPEN HUB
THEME
Partnership with Robots
#ロボティクス