
01
2024.04.20(Sat)
目次
本ウェビナーでは、NTTコミュニケーションズ(以下、NTT Com)のスマートモビリティ推進室の室長である松田達樹(以下、松田)と、産業用IoTミドルウェア「intdash(イントダッシュ)」を提供するアプトポッド代表取締役の坂元淳一氏が、コネクテッド社会の実現に向けて重要視される「自動車や移動するIoT機器の自動/遠隔制御」をテーマにクロストークしていきました。

松田:まず、スマートモビリティ推進室の取り組みの柱としては、大きく3つ――(1)コネクテッドカープラットフォーム、(2)車両セキュリティ、(3)自動運転ロボット管制プラットフォーム――があります。この中の、コネクテッドカー(および移動するIoT機器)プラットフォームにおいて、遠隔操作のためのネットワークエッジとの連携や、エッジ側から膨大な情報を収集するためのソリューションという部分で、アプトポッドが開発するIoTミドルウェア「intdash(イントダッシュ)」を導入しています。
坂元氏:intdashは、自動車やロボット、重機、農機といったさまざまなネットワークエッジのデータをクラウドやサーバにつないで、リアルタイム性のある双方向通信を可能にする高速プラットフォームです。また、通信される膨大なデータをクラウドサイド、サーバサイドに蓄積し、確実に保存する機能も持っています。

需要が多いIoTデータのリアルタイム可視化についても、Webのダッシュボードを提供することで対応しています。また、そもそもコネクトされていない自動車やIoT機器にゲートウェイ装置をつけてインテグレーションしたり、エッジコンピューターを提供したりするのも役目です。最近はエッジ側でのAI処理の要望が多くなっていますので、高スペックなエッジソリューションを提供しています。
松田:アプトポッドさんが持っているネットワークエッジとのデータ通信やデータ収集のノウハウと、NTT Comの広域分散のネットワークシステムやセキュリティにおけるアセットを組み合わせることで、質の高いコネクテッドサービスを実現できると考えています。
坂元氏:5Gをはじめとする大容量回線のある時代に入って、intdashのようなソフトウェアや、コネクテッドサービスのニーズはさらに高まっていますね。
松田:一方で、経済産業省の「ものづくり白書」によると、各産業の現場では働き手不足が深刻化しています。中でも建設業は顕著で、サービス業や製造業でもこうした傾向が強いですよね。
坂元氏:産業全般において、労働集約型の働き手が不足しているのは明らかです。メーカーがコネクテッド事業に進出する背景には、こうした人手不足が影響していると感じています。また、現場が回らなくなればビジネスが拡大せず、GDPにも影響してくるでしょう。「国力」のことを考える上でも、自動化・遠隔化を取り入れて、少ない人数で業界を回していけるようにしないと、生産性は向上していかないでしょうね。
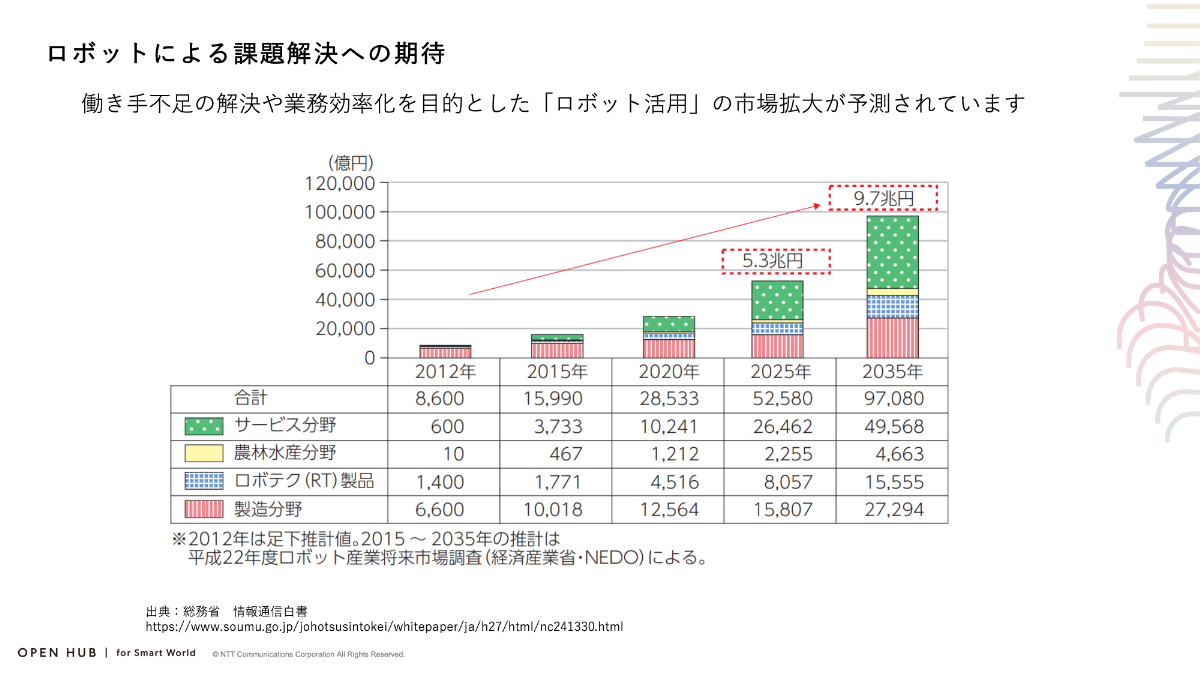
松田:総務省によれば、2035年にはロボット産業の市場が9.7兆円まで拡大すると期待されています。このあたりについてはいかがでしょう?
坂元氏:ロボット市場はもっと早く伸びるのではと思っていましたが、実際には法律の規制があったり、十分な費用対効果が見えなかったりと課題もありました。しかし、いよいよ2025年ごろを境に一気に市場が拡大するのではと見ています。「2025年の崖」といわれたりもしていますよね。
松田:ついに時代が来たという感じがしますね――。ここで目を向けたいのが、道路交通法の改正です。2023年の4月1日に2つの大きな改正がありました。
1つめは「特定自動走行に係る許可制度の創設」に関する規制の整備で、遠隔監視体制を整えて届出をすれば、運転者がいない状態での自動運転(レベル4)を行えるようになりました。2つめは、「遠隔操作型小型車」と呼ばれる自動配送ロボット(モビリティ)についてです。こちらは遠隔監視の体制を整えれば、監視員がつかなくても道路を走れるようになりました。こうした法整備からも、だいぶ時代が進んだことが分かりますね。
坂元氏:北米とか中国など一部の国では、かなり前から相当自由度の高い自動運転を実証できる環境が整えられていましたし、日本もどんどん規制を緩和していって加速していくべきだと思います。もちろん「安全に」ということが、重要ですけれどね。
松田:昨今は、産業現場におけるロボットの使用も増えてきました。例えば製造業では、産業用ロボットによる工程の自動化や、無人搬送車(AGV)を使用した工場内運搬の自動化などが進んできています。物流業や建設・土木業、生活産業、スマートシティビジネスなどの領域でもさまざまな取り組みが始まっていますよね。
坂元氏:我々もあらゆるユースケースでの自動化・遠隔化を経験してきましたが、この時にボトルネックになりやすいのが通信です。通信が届かなかったり安定しなかったりすると、全体のソリューションが崩れてしまいます。今後は、ローカル5Gを含めていかに通信を確保してサービスのクオリティを上げていくか、というところが重要になってくるでしょう。
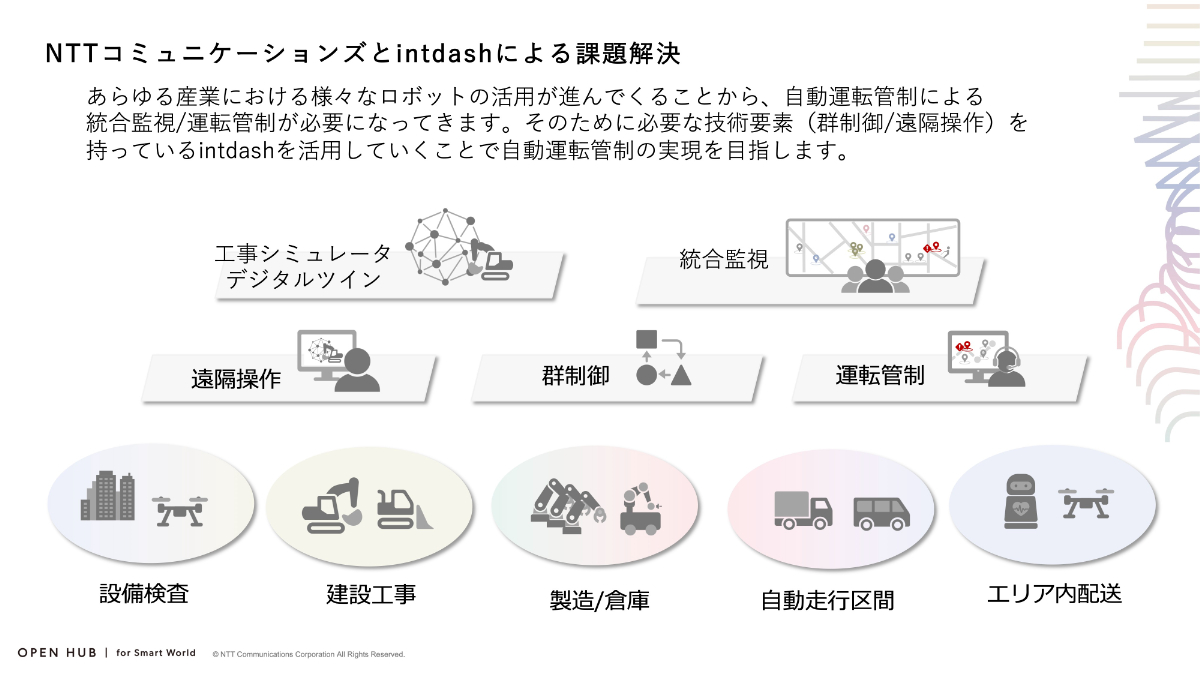
松田:やはり、安定した通信環境の確立は重要ということですね。NTT Comでは、「自動運転管制プラットフォーム」の構築についても取り組んでいます。これはエリアで動き回るロボットが増えてくると、安全に運行させる上で、それぞれを独立して動かさずに統合的に管制をすることが重要になるからです。アプトポッドさんでは、管制システムなどに関して、具体的にどのような取り組みをしているのでしょうか?
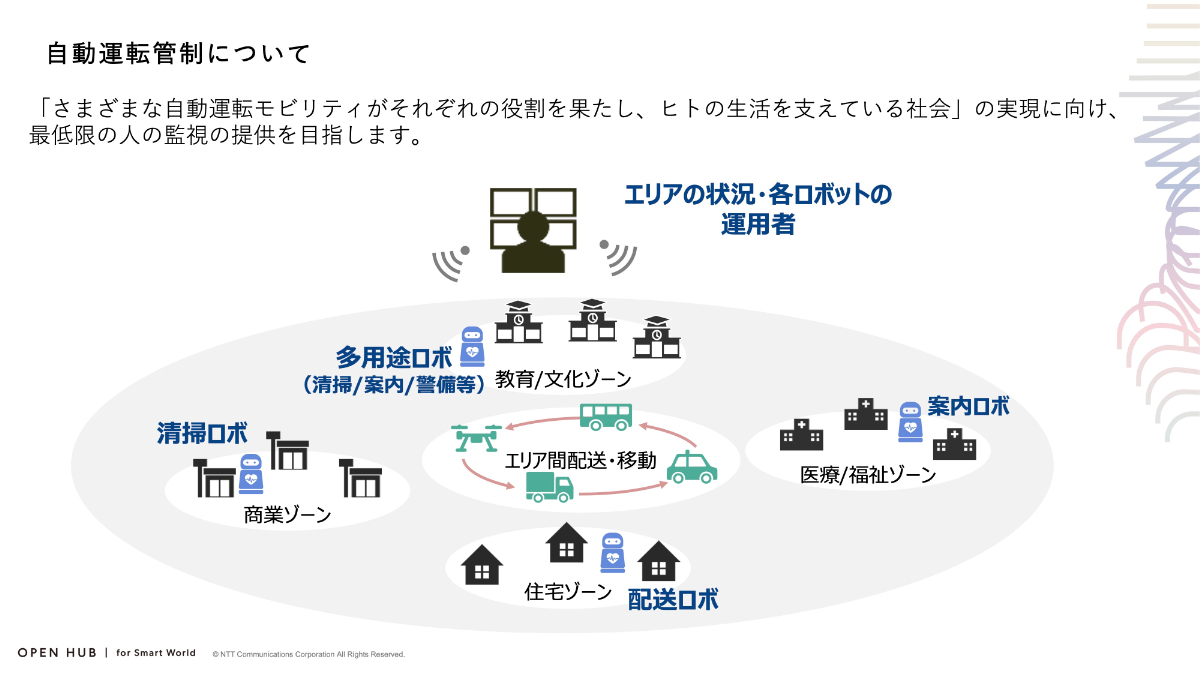
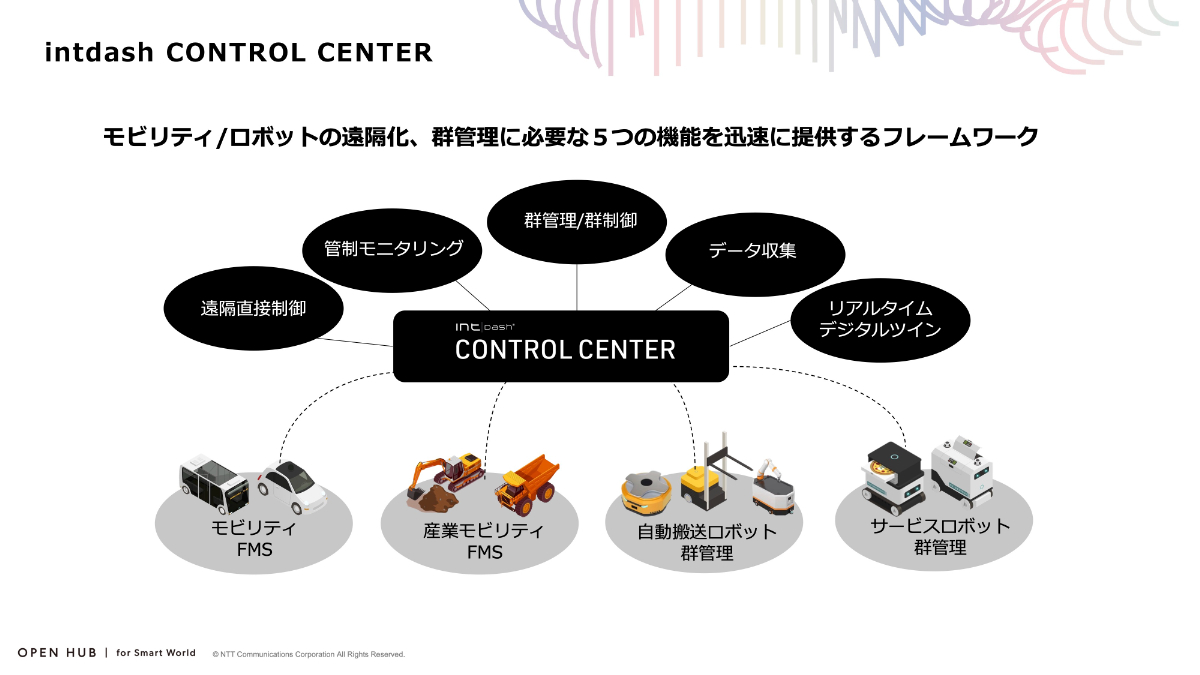
坂元氏:弊社では、intdashをベースにした「CONTROL CENTER」というソリューションを提供しています。管制システムで必要になる機能はいくつかありますが、特に需要の多い機能として、(1)遠隔での制御、(2)管制モニタリング、(3)群管理(複数機体の管理・制御)、(4)データ収集、(5)デジタルツイン――の5つをピックアップしており、CONTROL CENTERではこれらを組み合わせることが可能です。
CONTROL CENTERのユースケースはさまざまですが、例えばスマートシティにおけるモビリティ管理においては、実証事業を含めてすでに管制システムの構築に取り組んでいます。今後は自動運転車両だけでなく、デリバリーロボットのようなものも市中を走るようになってくるので、これらを統合的に管理していかなくてはいけません。
松田:なるほど。ほかにはどのような課題を認識されていますか?
坂元氏:商業施設、工場、物流倉庫のような施設で考えてみると、警備ロボットやモノを運ぶロボット、人を乗せるロボット、掃除をするロボットなど、さまざまな機体が動き回っています。これらがすべて同じメーカーのロボットならよいのですが、マルチベンダーというケースも多々あります。つまり、いろんなメーカーのロボットを一元管理しなくてはならないわけです。これが結構難しい。ロボットの「インターオペラビリティ(Interoperability)」といわれている領域です。
ここを解決するために、「ROS(Robot Operating System)」というフレームワークを開発している団体が、「Open-RMF」というロボットの協調システムを提供しています。我々はこのミドルウェアをintdashと連携させて、群管理をリアルタイムに行えるようにしようとしています。
坂元氏:また、土木建設現場においては、危険が伴う作業も多く、重機のオペレーターも不足しています。そのため重機の遠隔操作などのニーズは高いです。ただし、土木現場は状況の変化がとても大きくて作業も繊細なので、カメラの映像だけでは距離感が把握できず、うまく遠隔作業ができなかったりします。
松田:現場の地形もどんどん変わりますからね。
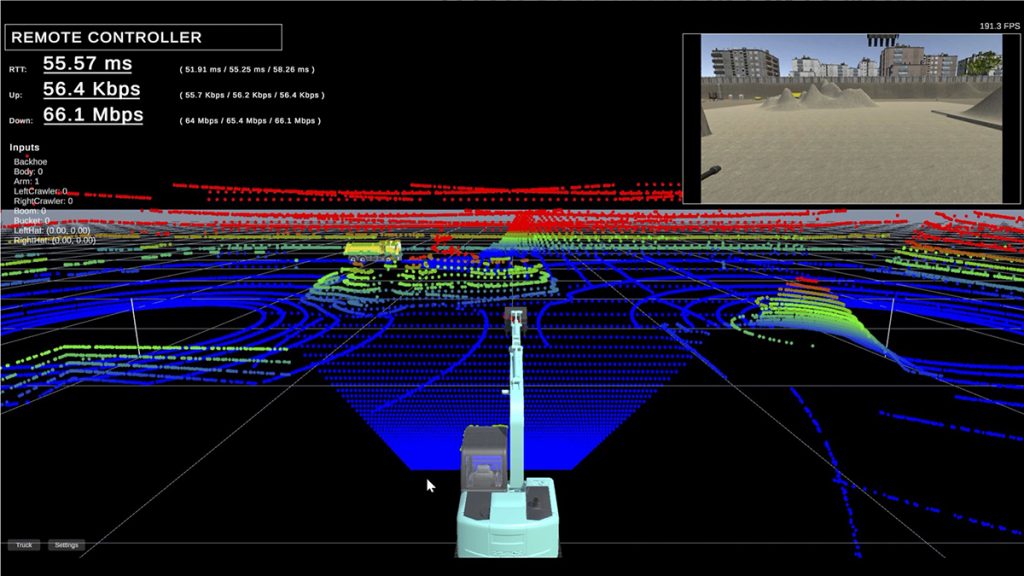
坂元氏:そうなんです。なので常に正確な測量をしながら遠隔制御をしなくてはいけません。刻々と変化していく現場を正確に捉えるには、LiDARシステムで地形全体をスキャンして、リアルタイムに把握していく必要が出てきます。我々はこうしたデータをデジタルツイン環境で表現することで、高精度で直感的なモニタリングができるようにしたいと考えています。
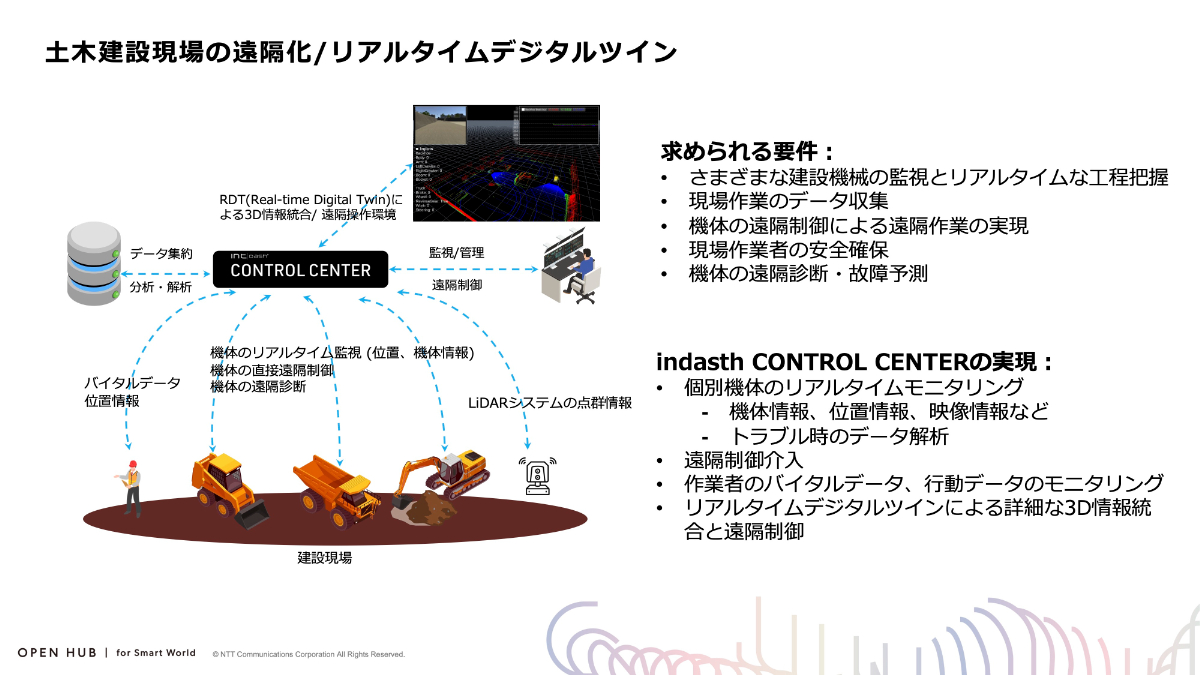
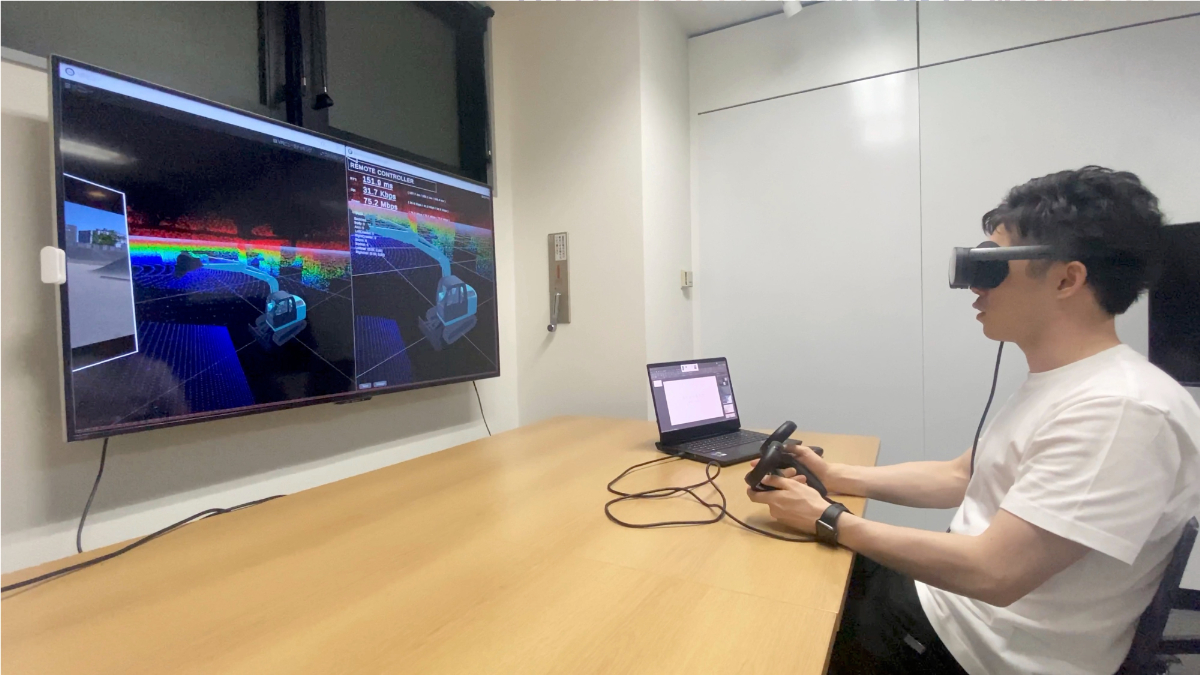
さらに、3Dの点群を見ながら遠隔制御ができるようになっています。カメラで見ながらの制御と比べると、さまざまな角度から確認できるので、距離や位置関係を把握しやすいのが特徴ですね。
松田:単純に遠隔から操作できるだけではなくて、視点を変えられるのが新しいですね。
坂元氏:しかもフレッシュな地形データを同時に受信しますので、施工状態をアップデートしながら作業できます。VR(バーチャルリアリティ)を組み合わせることで、かなりの没入感を得られるとともに、斜面に対する距離感把握の正確性なども向上しました。
松田:遠隔で土木現場の操作ができるということは、例えば、熟練したオペレーターが東京に居ながらにして、全国の現場を順番に回っていけるようになるわけですよね。
坂元氏:そうです。よくこういう遠隔化の話になると出てくる話なのですが、もしも世界中のスタッフに協力してもらって時差を工夫しながら8時間ずつ操作してもらえたら、24時間連続で稼働することもできるかもしれません。
松田:なるほど、全国どころか世界中からと。新人教育などでも効果的な活用方法がありそうですね。
坂元氏:このシミュレーターを使えば、遠隔地にいる人に対して重機の使い方を教える、といった経験も提供できるでしょう。産業の分野において、デジタルツインを使った教育コンテンツは今後伸びてくるのではないでしょうか。
松田:一方で、こうしたデジタルツインのような取り組みが増えると、大量のデータをリアルタイムで伝送していかなくてはいけません。NTT Comとしても、このあたりで大きく貢献できるのではないかと感じています。
坂元氏:今回のデモンストレーションは、NTT Comさんの構築されている5G環境で行えたこともあり、スループットが出せて非常にスムーズに処理ができたと感じています。どんどん現場に持ち込んで、お客さまの課題を解決していきたいと思います。
松田:このように複数動くロボットを遠隔で制御したり、管制したりする世界を築いていけば、いずれは産業間をまたがって管理・管制していく必要も出てくるはずです。こうした点について、NTT Comとアプトポッドさんで描いている世界観はとても似通っていると感じています。
坂元氏:そうですね。我々は創業以来、IoT分野で事業展開してきましたが、フィジカルスペースにあるものをクラウドの世界に吐き出したり、戻したりしていく相互通信は、とても難しいものだと思っています。例えば、機械の制御信号そのものと、ゲートウェイと接続する信号をどのようにつなげるかを考えなくてはなりません。また、通信の遅延があったときにも、通信そのものが影響しているのか、ソフトウェアの処理が遅延を生んでいるのかを判断しなくてはなりません。我々はこうしたノウハウを蓄積してきました。

さまざまな課題を乗り越えて、データとフィジカル、そして昨今話題に上がるようになってきた「デジタルツイン」をトライアングルでつなげていく――。最終的に、エンドユーザー向けの新しいユーザーエクスペリエンスを創出していくことを目指していきたいと考えています。きっと、このあたりのビジョンについてご共感いただけているのかなと。
松田:そうですね。まさに同じところを向いていると感じます。これから、ヒトもモノもロボットが運ぶ時代を一緒につくっていきたいと思っています。

OPEN HUB
THEME
Partnership with Robots
#ロボティクス