01
2025.07.09(Wed)
Hyper connected Society
2024.12.13(Fri)
#64

この記事の要約
建設土木業界が直面する人手不足や生産性向上の課題に対し、スタートアップ企業ARAVとNTT Comが共創した建機DXソリューション「Model V」が注目を集めています。Model Vは、旧式の建機を含むあらゆる機種に後付けで取り付け可能な遠隔操縦システムです。
このシステムにより、危険な現場作業の回避や、遠隔地からの操縦が可能になり、就業のハードルを下げることができます。また、Starlinkなどの通信技術を活用し、山間部などの通信環境が整っていない場所でも運用が可能です。
ARAVの白久レイエス樹氏は、将来的にはあらゆる建機の遠隔操縦・自動化、複数建機のネットワーク化、さらには宇宙での建設工事への応用まで視野に入れています。Model Vの普及により、建設土木業界の未来が大きく変わる可能性を秘めています。
※この要約は生成AIをもとに作成しました
目次
――Model Vのようなソリューションが生まれた背景として、まずは建設土木業界が今抱えている課題を教えてもらえますか。
白久レイエス樹氏(以下、白久氏):一番大きな課題は他業界と同じ「人手不足」です。少子高齢化による労働人口の減少の影響は、建設土木業界にも当然見られます。

杉浦克尚(以下、杉浦):加えて建設土木業界に特有なのは、高所や山間部など、危険な場所での作業や長時間労働への危惧から、若者を中心に就職先として敬遠されがちなことです。建設業就業者の年齢構成は、いわゆる高齢者層の割合は約36%で、全産業の平均である約32%と比べても高く、対して29歳以下は約12%しかありません。

白久氏:そうした課題がある一方で、建設業の需要は拡大傾向にあります。特に都市部の再開発はもちろん、既設の橋や道路といった社会インフラの維持・整備の需要は顕著に増えていくと予想されており、人材の受給に大きなミスマッチが生じています。
さらに、2024年から時間外労働時間の上限が規制されるようになり、人手不足を長時間労働で補っていた状態も見直される状況にあります。
――一連の課題の解決、つまり人材不足の解消や安全性、作業の効率化が求められる中で生まれたのが、建機の後付けアタッチメント式ソリューションであるModel Vということですが、具体的にはどのような技術なのでしょうか?
白久氏:建設土木業界の課題解決を目指したDXソリューションは多々あります。その中で私たちは、さまざまな条件下にある建設現場に対応できる建機の遠隔操縦・自動化ソリューションを開発することで、DXの普及を実現したいと考えているのです。
Model Vは建設現場から遠く離れた拠点からネットワークを介し、PCやタブレットを使って建機を自在に操作できるようになる装置です。遠隔操縦は実工事現場での利用が進んでいる段階にあります。また、繰り返し作業の省力化を目的とした自動運転機能も現場実証が始まっております。
――建機の遠隔操縦は、既存の建機メーカーや建機レンタル業者がすでに開発を進めていた分野でもありますが、そうした中でModel Vが注目を集めている理由はどういった点にあるのでしょうか。
白久氏:建機メーカーや建機レンタルの遠隔操縦システムとの大きな違いは、後付けのアタッチメントであることです。遠隔操縦に対応している既存の建機は基本的に新型モデルばかりになるのですが、建機は耐用年数が長く、今でも多くの現場では旧型モデルが現役で稼働しています。後付け式のModel Vには、メーカーを問わず20年、30年前のモデルでも対応できる汎用性があるのです。
例えば、建機の中で最も多く使われているのは油圧ショベルで、国内の保有台数は70万台です。新型車両の販売台数は年間4万台とされているので、モデルチェンジによって遠隔化を実現しようとするとおよそ20年かかってしまう計算になります。後付けであれば、現在使っている建機を遠隔・自動化していくことができるので、スピーディかつ低コストにDXを進めることが可能になります。
――なるほど。あらゆる建機に対応可能ということですが、今使われている建機には大きく分けて「電気式」と「機械式」の2種が存在します。そのどちらにもModel Vは対応しているのでしょうか。
白久氏:そうですね。新型の建機の多くは、動力や制御に電子機器が使われている電気式なので、建機本体にModel Vの制御ボックスからハーネスを接続することで、遠隔操縦を実現するシステムになります。
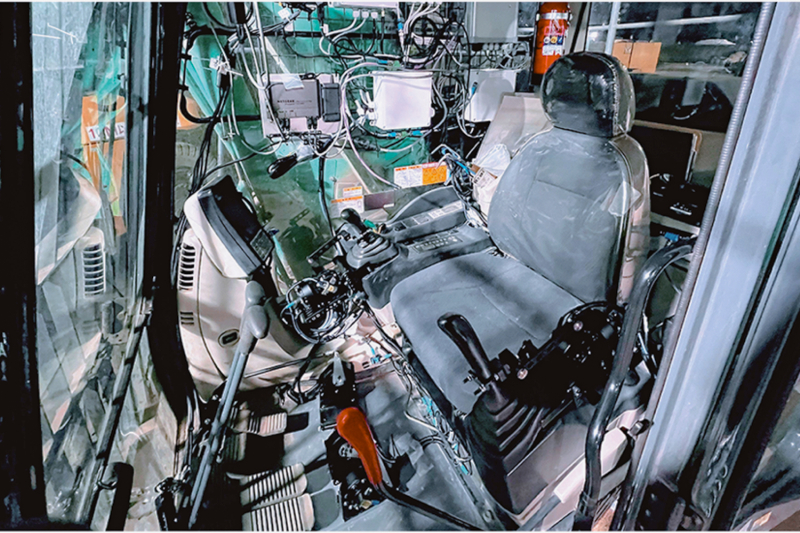
対して旧型モデルの建機は、電子制御ではなく油圧による機械制御で駆動する方式です。こちらは電気信号で制御するのではなく、建機の操縦席にアクチュエータ(駆動部品)を取り付けて、操縦席にあるジョイスティックのレバーや、アクセル、ブレーキといったフットペダルを物理的に制御できるようにするのです。
――アクチュエータを後付けして、建機をロボット化するイメージでしょうか。
白久氏:そうですね。ロボット化という視点はARAVらしさを表現するものかもしれません。弊社に集まるエンジニアは、自動車や家電業界出身の仲間が多く、ソフトウェアに関してはもちろん、ハードウェアに関しての知識も持ち合わせていることが、精度の高いソリューション開発に結実しているのだという自負があります。
Model Vを実装することで、例えば東京のオフィスにいながら、1,000km離れた山奥の土木建設現場の旧式油圧ショベルでも遠隔操縦で作業を進めることができるようになります。そうした環境が整備されることで、操縦者が危険な現場に出向く必要がなくなり、事故が減ると同時に就業のハードルもぐっと下げられます。オフィスや自宅でも作業ができるとなれば、たとえば下肢障がいのある方や、事情があって長時間は働けない方などでも操縦者になれるでしょう。

建設現場では、建機によっては1日1時間ほどしか実稼働しない場合も多くあります。遠隔化が実現すれば、短時間の稼働のために操縦者が遠方まで来る時間的なコストを削減できます。また、1人の操縦者が1つの拠点から複数の現場の建機を操る、といった働き方も可能になります。さらに、ネットワークを介した遠隔操縦が普及していくと、その作業ログも蓄積していくため、自動運転のためのデータとして活用できます。
このように、Model Vのようなソリューションを普及させることは人手不足や生産性向上を多角的にアシストすることにつながるわけです。
――2024年6月からはNTT Comとの共創がスタートするわけですが、その背景についても教えていただけますか。
白久氏:遠隔操縦や自動運転は、安定したネットワーク環境が整っていなければ実現しません。通信に遅延が起こってしまうと作業に影響が出てしまいますし、土木建設の現場の多くは山間部などの遠方で電波が届きにくい場所も多いのです。Model Vの開発において、ネットワークインフラの領域はボトルネックになっていたため、通信技術に圧倒的な強みを持つNTT Comさんのお力をぜひ借りたかったのです。
杉浦:NTT Comはこれまでも、建設土木業界の課題解決にいろいろな形で協力させていただいていました。その流れの中で、ARAVさんとは2023年11月に千葉県に設置した除雪車を宮城県のコックピットから遠隔操縦する実証実験を実施させていただいたのです。われわれとしては優れたテクノロジーを持つARAVさんとコラボレートすることで建設現場の未来を変えるソリューションが実現する大きな一歩が踏み出せると考え、パートナーシップを結ぶことになりました。
――具体的には、どのような通信技術を用いているのでしょうか?
杉浦:5GやLTEなどのスタンダードな通信回線ではなく、「Starlink Business」を活用しています。
――スペースXが手掛けている衛星通信サービスですね。
杉浦:はい。6,000基以上といわれる衛星をつなげて通信網を構築しているため、5Gなどの通信環境のない山間部でもネットワークにつなげることができます。
また、リアル環境に近い遠隔操縦を実現するためには、現場の映像を最小のタイムラグで高精度に送受信することが必要となります。さらに場所によっては、建機だけではなく周辺環境の映像やセンシングデータも送受信しなくてはならない場合もあり得ます。それは操作品質や安全性に直結することになります。そこで、独自ネットワーク内で通信を行うことでモバイル通信のリアルタイム性・セキュリティ性の向上を図るdocomo MECなどのサービスを組み合わせて、それぞれの現場に最適なソリューションを提供しています。
また、IOWNを構成する主要な技術分野の1つであるAPN(※)の活用により、さらに高度なソリューションが提供可能になると考えます。
白久氏:NTT Comさんとのパートナーシップを発表したことで、Model Vへの期待が高まっていることを感じています。「以前から興味はあったが、例えばこんな場所でも設置、接続できるのか」「今こんな現場があるが、遠隔操縦できそうか」といった問い合わせをいただくようになりました。現在の建設業界は「環境をもっと良くしなければ」「業界のイメージを変えたい」といった危機感と課題感を持っている方が増えてきています。われわれのソリューションがその一助となり、未来を変えるお手伝いができると確信しています。
※ APN(All-Photonics Network):端末からネットワークまで、すべてにフォトニクス(光)ベースの技術を導入し、エンド・ツー・エンドでの光波長パスを提供する波長ネットワークにより、圧倒的な低消費電力、高品質・大容量、低遅延伝送を実現する通信技術およびサービス。

――今後、遠隔・自動操縦の普及を目指していく上でハードルがあるとしたら、どういった点にあると感じていますか?
杉浦:新しい技術ですし、現場や職人技をとても大切にする業界ですから、どうしても二の足を踏む方も多いと思います。だからこそ、われわれのソリューションの技術力の高さを実際に体験してもらえれば、導入する価値のある「使える」ものであるということを理解していただけるのではないかと思います。
白久氏:そうですね。現在、国土交通省と建設業界が「自動施工における安全ルール」を策定し始めました。建機の遠隔・自動操縦を実装化していく上で必要な、例えば「緊急停止ボタンの動作をどうするか」「作業用パトライトは何色にするか」といったルールを決めているのです。遠隔・自動操縦への機運が高まっているのを感じています。こうしてさまざまな方面から機が熟せば、景色は一変すると思っています。
――最後に、今後のビジョンを教えてください。
白久氏:3ステップで考えています。最初のステップは、人手不足が深刻化する業界の喫緊のニーズに応えること。後付可能な強みを生かし、あらゆる建機を遠隔操縦・自動化させるとともに、フォークリフトなどの土木・建設以外の物流領域もアップデートしていく。2つめのステップは、1つの現場に多数ある建機に対し、メーカーの垣根を超えてネットワークでつなぎ合わせることで、これまでは想像できなかったさらなる効率化を群制御により実現すること。3つ目は、宇宙での建設工事への進出です。
建機が活躍する場所には極限環境と呼ばれるものも多くあります。事故現場や災害現場です。そして、その先には宇宙もあるだろうと考えています。すでに国土交通省も月面の建設事業について将来計画を発表しました。宇宙開発の現場も、私たちの遠隔操縦・自動化ソリューションが大いに活躍できる領域であると想定して備えていきたいと考えています。
杉浦:そうですね。われわれNTTグループも今年「NTT C89」という宇宙ビジネス分野のブランドを立ち上げました。NTT C89を通じてグループ内の多様な事業・サービス・研究開発が有機的につながり、発展していくことを目指していますので、私たちの立場からも宇宙建設に貢献できるチャンスはあると期待しています。


OPEN HUB
Theme
Hyper connected Society
#IoT
OPEN HUB
THEME
Hyper connected Society
#IoT